
Back to 2015 Annual Meeting Program
Paired Regenerative Peripheral Nerve Interfaces Predict Rat Limb Locomotion
Daniel Catalin Ursu, MS1; A. Nedic1; Cheryl A. Hassett, BS1; Jana D. Moon, BS1; Nicholas B. Langhals, PhD1; RB Gillespie2, Paul S. Cederna, MD1; MG
1Plastic Surgery, The University of Michigan, Ann Arbor, MI; 2Mechanical Engineering, The University of Michigan, Ann Arbor, MI
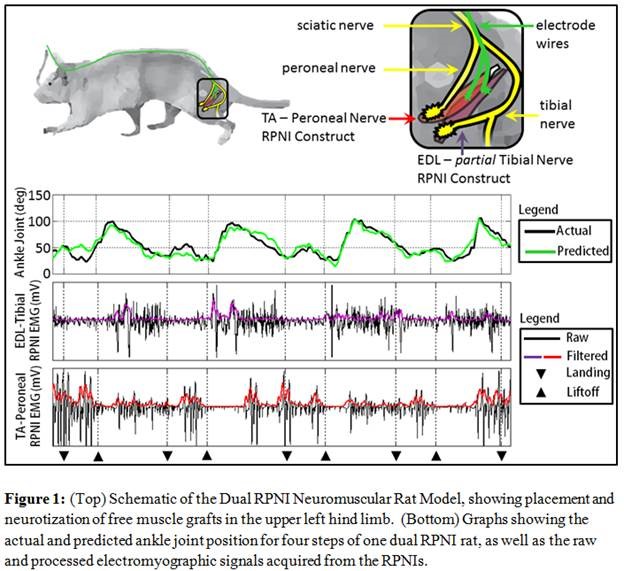
Introduction: Regenerative Peripheral Nerve Interfaces (RPNI) are neurotized autologous free muscle grafts equipped with electrodes to record myoelectric signals for prosthetic control. Signals collected from single RPNI implanted in the rat hind limb display strong relationships to joint angles during walking. However, myoelectric prosthesis controllers need at least two signals to produce agonist – antagonist paired actions that control and limit movement. Our purpose is to determine the predictability of hind limb joint angles from dual RPNI myoelectric activity during walking.Methods:Two groups of three rats each were experimentally formed. In the Control group, patch electrodes were positioned on the left extensor digitorum longus and soleus muscles. Rats in the RPNI group received two free muscle transfers to the ipsilateral left thigh and re-innervation with a proximal tibial nerve fascicle and fully transected peroneal nerve, respectively. Electrode wires were run subcutaneously to a headstage. Evaluations were performed 4-5 months post-surgery. Rats walked on a treadmill at constant pace. Synchronized videography and data acquisition were used to identify joint angles and acquire myoelectric signals. The hind limb ankle joint angle predictive capacity of the paired RPNIs was assessed as a weighted linear combination of the dual RPNI myoelectric activity using multidimensional linear regression.
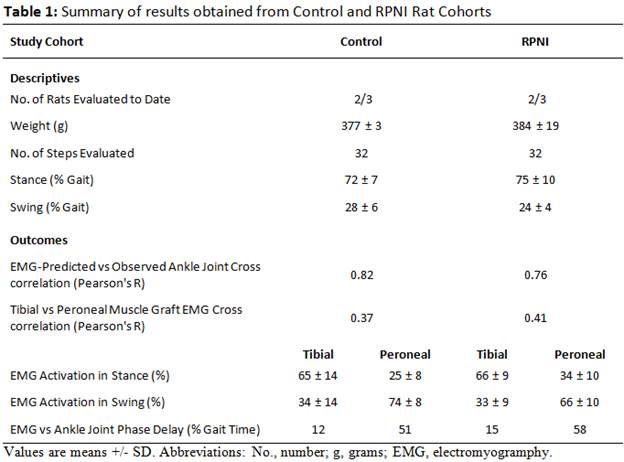
Results: Myoelectric signal patterns were highly repeatable within rats and within groups (Table 1). Control group myoelectric signals were periodic with observed joint angles and reflected typical agonist and antagonist activation patterns. The RPNI group signal pattern was also periodic with gait, though, as expected, signaling was lower than controls. The activation of the agonist antagonist myoelectric signals within RPNI rats exhibited a constant phase delay, proportional to walking speed. A comparison of the predicted to the observed hind limb joint angles from the myoelectric activity of the paired RPNIs indicated consistent and accurate walking pattern generation (Figure 1).
Conclusion: This study determines that in vivo myoelectric activity of RPNI antagonistic pairs is periodic and can predict hind limb joint angles observed during walking. RPNIs paired signal patterning, repeatability, timing, and amplitude during walking are appropriate for prostheses control algorithm development.
Acknowledgments: DARPA (N66001-11-C-4190).
Back to 2015 Annual Meeting Program